Institute of Robotics and Automatic Information System
Laboratory Profile
The Institute of Robotics & Automatic Information System (IRAIS) was founded in spring 1998 within the College of Information Technical Science of Nankai University. In 1985, Nankai initiated robotics research and established the Artificial Intelligence and Robotics Laboratory. It has been awarded with multiple titles, namely an open laboratory on robotics in the National High Technology Research and Development Program (863 Program) of China in 1990, Tianjin Key Laboratory of Intelligent Robotics in 2013, National Education Center for Virtual Simulation in 2015, and Tianjin International Cooperation Base in 2016. Subsequently on May 11, 2018, the research works of the institute and the education programmes of the department were united together, and became the base for the new College of Artificial Intelligence of Nankai.
HISTORY OF IRAIS
1971 Department of Automatic Control of Nankai University
1985 Lab of Artificial Intelligence and Control Theory
1990 Chinese Hi-tech Open Lab of Robot Control Theory and Technology
2013 Tianjin Key Laboratory of Intelligent Robotics
2018 College of Artificial Intelligence
SOME REPRESENTATIVE RESEARCH RESULTS
The constructed 32-ton automatic industrial crane

In addition to theoretical and laboratory studies, a 32-ton automatic industrial crane system is constructed. Many control algorithms have been applied and realized in the 32-ton industrial crane, which significantly improve its effectiveness and efficiency.
The world's first cloned piglets produced by robotic SCNT

We increased the blastocyst rate from 10-14% to 21% and successfully produced 17 cloned piglets by robotic SCNT for the first time. The success rate of cloning was doubled compared to the traditional methods (3.3% VS. 1-2%).
Exoskeleton assistance during walking
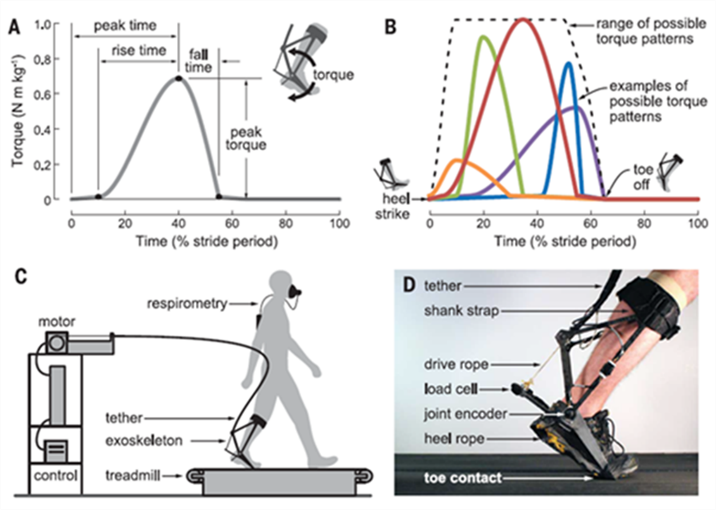
A method for identifying the exoskeleton assistance that minimizes human energy cost during walking. Optimized torque patterns from an exoskeleton worn on one ankle reduced metabolic energy consumption by 24.2 ± 7.4% compared to no torque. (Science 2017)
Research Team

Contact US
HR:+86 2285358228 guoyufei@nankai.edu.cn; International Office:+86 2223505863 mengjin@nankai.edu.cn
Location/Campus Map
38 Tongyan Road, Jinnan District, Tianjin, P.R.China 300350



