Tianjin Key Laboratory of Intelligent Robotics
Tianjin Key Laboratory of Intelligent Robotics was approved in 2013. It has been awarded with multiple titles, namely National Education Center for Virtual Simulation in 2015, Tianjin International Cooperation Base in 2016, the supporting unit of Chinese Institute of New Generation Artificial Intelligence Development Strategies in 2017. In 2018, the College of Artificial Intelligence was established. In 2020, it was approved as a base for Introducing Talents of Discipline to Universities on robot intelligent perception, control and application (111 Base).
The main research directions include but not limited to the following aspects:
Advanced Control
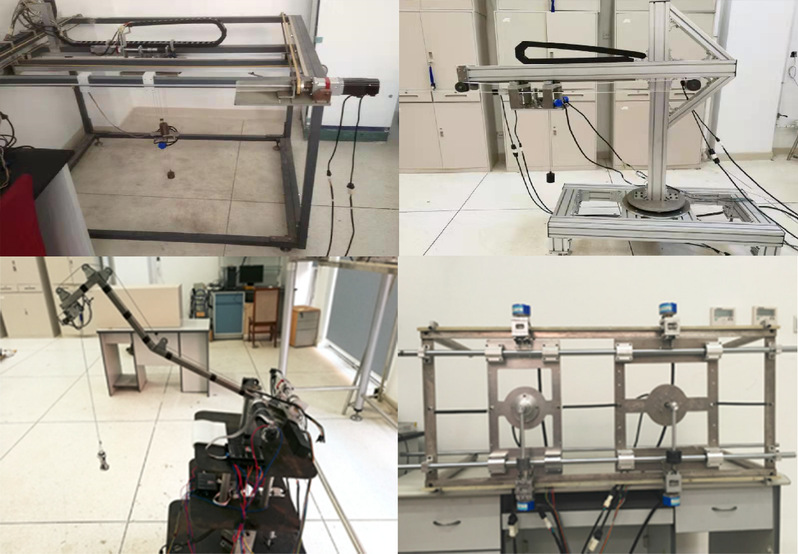
Overhead cranes, tower cranes, offshore cranes, and multi-RTAC are representative underactuated systems. A series of effective control methods, e.g., trajectory planning and energy-based control, are proposed.
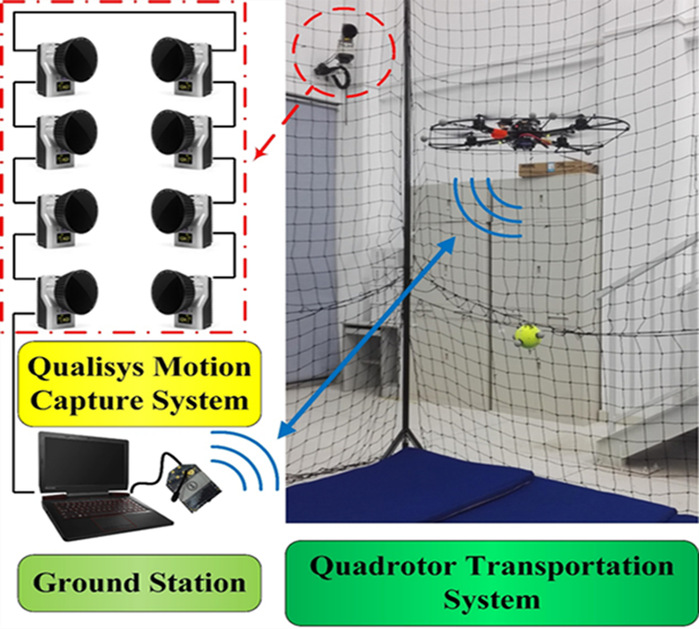
Rotorcrafts are capable of transportati- on tasks in complex environments which are infeasible for ground robots. A hierarchical control scheme is proposed, which greatly facilitates the design procedure.

By utilizing the ADRC stragegy, effective economic and social benefits have been achieved since the control temperature accuracy is within 2 degrees, with 12% of the electricity saving before transformation.
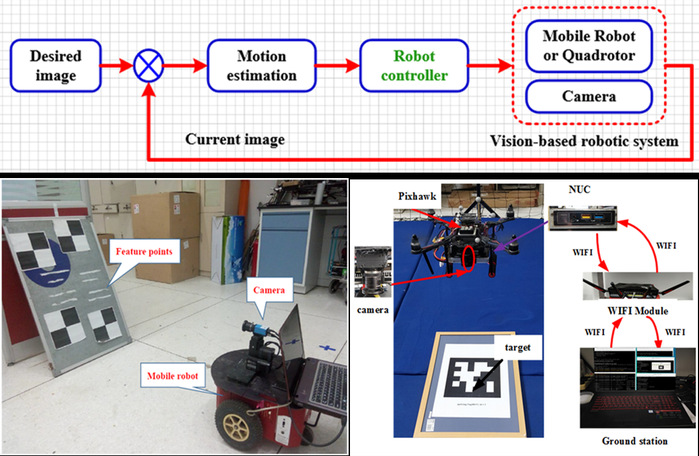
With real-time feedback images from the camera, vision-based controllers are designed for mobile robots and quadrotors, which can achieve stabilization or trajectory tracking.
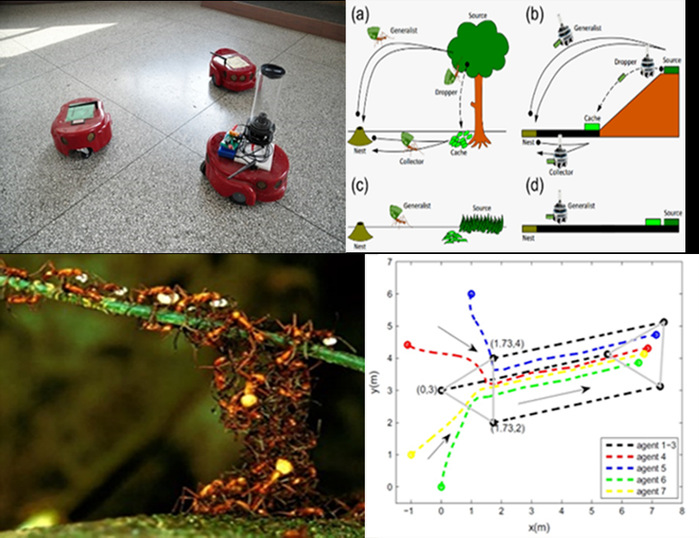
With the help of evolutionary game theory, complex network theory, stochastic process and other mathematical tools, the evolutionary dynamics of strategies in infinite and finite groups are investigated.

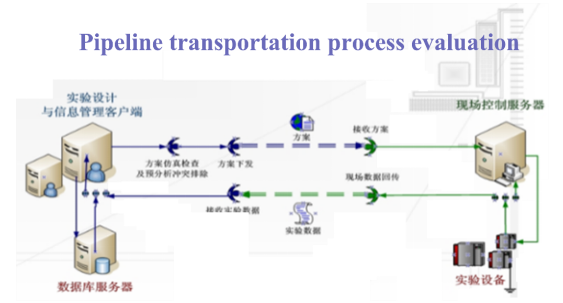
This is the Pipeline Transportation work-art Evaluation Automation Monitoring System, designed for the China Petroleum Pipeline science and Technology Research Center. Intelligent automatic control of the whole process of pipeline transportation process evaluation experiments and management and analysis of the experiments data have been realized.
Advanced Robotics Technology
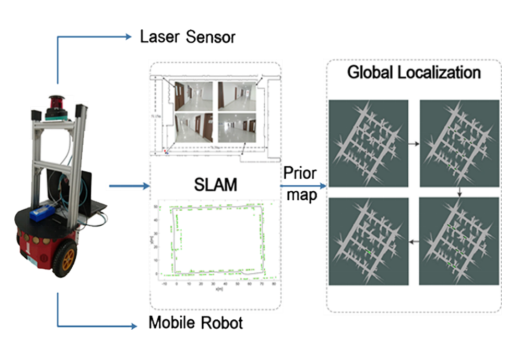
SLAM and global localization based on “directional endpoint” features for mobile robots.

Human-in-the-loop optimization of exoskeleton assistance during walking. (Science 2017)
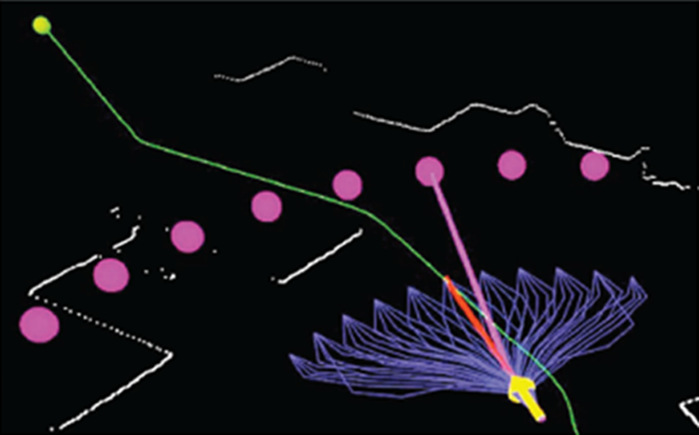
Multi-level human-like motion planning for mobile robots in complex indoor Environments.
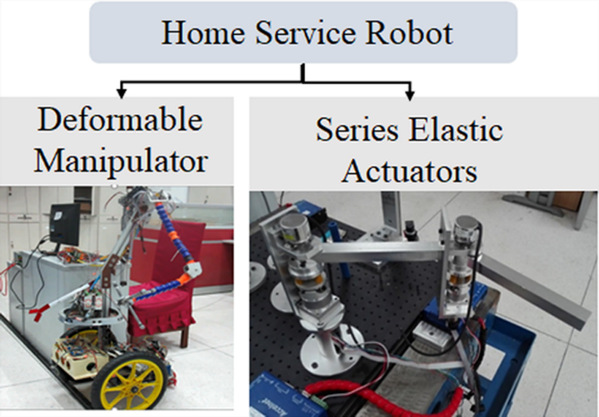
Kinematic-free control for a 4-DOF Deformable Manipulator based on the Perpendicular Curve in SO(3).
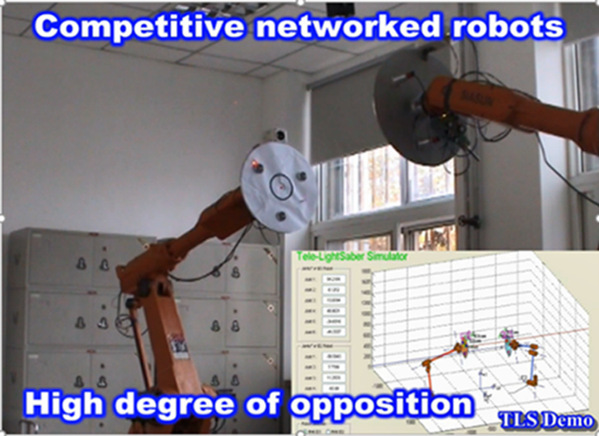
Competitive networked robots with high degree of opposition.
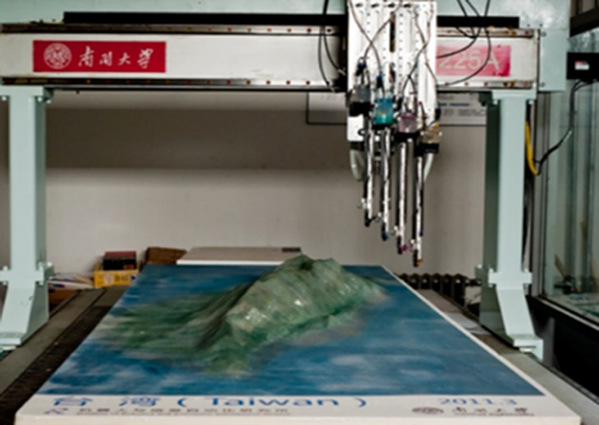
3D true color printing robot had been used in manufacturing products.
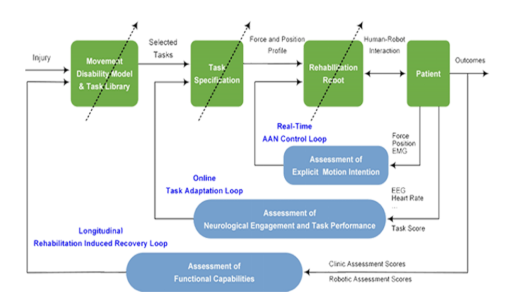
Patient Tailored Rehabilitation Therapy. Online Assessment and Adaptation of Trainings. Physical human-robot interaction with guaranteed passivity.
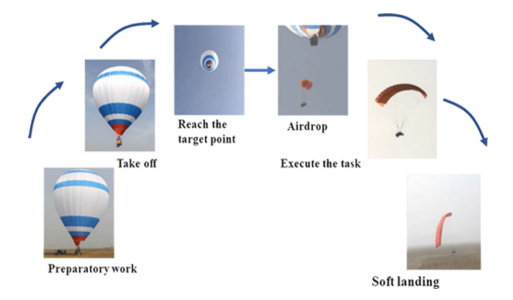
Parafoil robots: modeling based on computational fluid dynamics, active disturbance rejection control, trajectory planning, identification and prediction of wind.
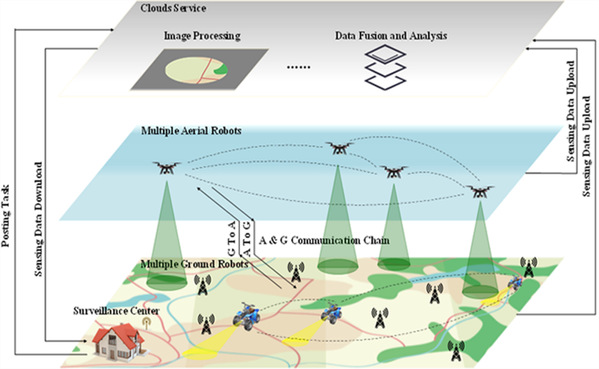
Wide Range and Dynamic Objects. Integrated Ground-air-space. Multi-robot and Full Autonomous.

An IMU (Inertial Measurement Unit) Sensor based Motion Capture System.
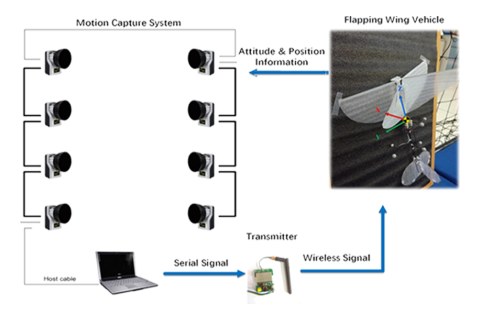
Flapping robots can fly based on visual sensors and nonlinear controller.
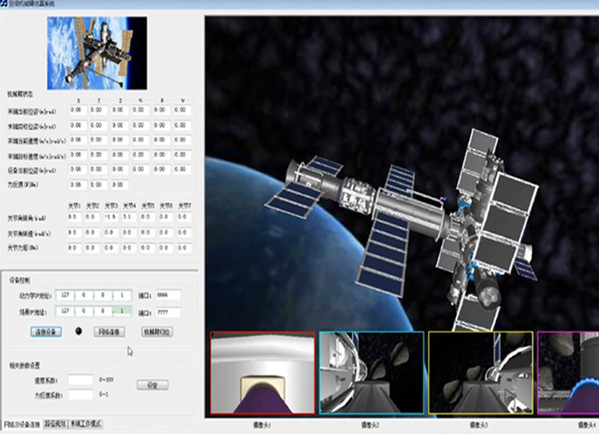
The study of China space station is supported by DDK virtual simulation software.

Surgery Robot: Perception and control for Laparoscopy, flexible ureteroscopy and spine surgery robot.
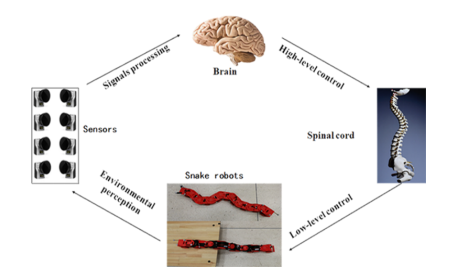
Snake robots : Intelligent motion inspired by human based on guided motion planning and reinforcement learning.
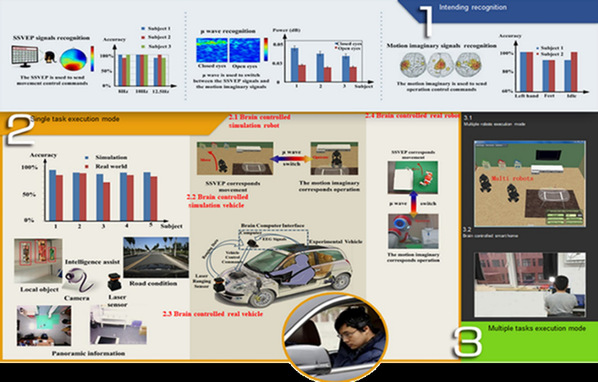
ISILAB includes three study directions: Intending Recognition based on ERD/ERS, Brain Controlled robot and mouse, Vehicle Controlled by Brain and Human.
Micro-manipulation & MEMS
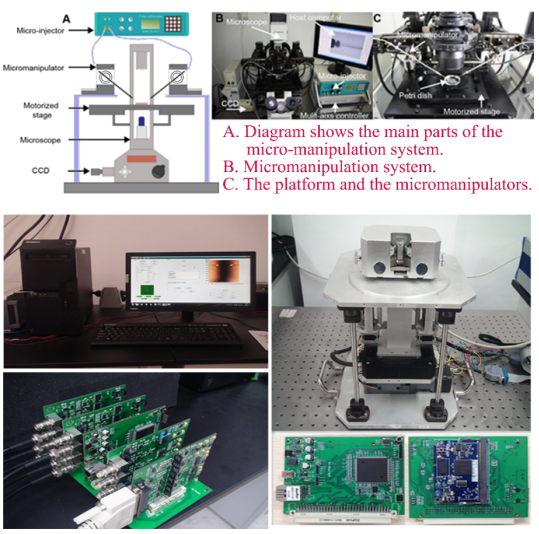
Micro/Nano Systems Control Lab mainly focuses on Atomic Force Microscope (AFM) developing, nanopositioning, fast AFM imaging, and nanomanipulation.
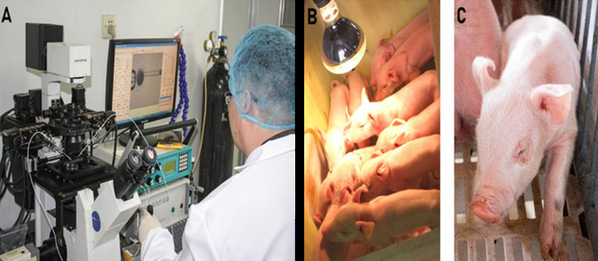
Cloned Pigs Produced by Robotic SCNT. A. Clone experiments. B-C. Cloned pigs.
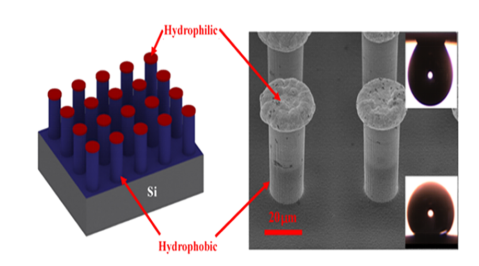
Inspired by the Salvinia effect, a novel “sticky” superhydrophobic surface sustaining a Cassie−Baxter wetting state for water droplets with high contact angles but strong solid−liquid retention is fabricated.

Contact US
HR:+86 2285358228 guoyufei@nankai.edu.cn; International Office:+86 2223505863 mengjin@nankai.edu.cn
Location/Campus Map
38 Tongyan Road, Jinnan District, Tianjin, P.R.China 300350



