Robotic Micro-nano Operation Laboratory
Robotic Micro-nano Operation Laboratory (ROMIOL, https://romiol.nankai.edu.cn ) was supervised by Prof. Xin Zhao (https://ai.nankai.edu.cn/info/1033/3968.htm ), the Talented Professor of Nankai University, Dean of the College of the Artificial Intelligence, Fellow of the Chinese Micro-nao technology Committee. The key members of ROMIOL includes Assistant Prof. Mingzhu Sun (https://ai.nankai.edu.cn/info/1034/4190.htm), Assistant Prof. Qili Zhao (https://ai.nankai.edu.cn/info/1034/4189.htm), Associate Prof. Yue Du(https://ai.nankai.edu.cn/info/1035/3599.htm), Postdoctoral Fellow Yaowei Liu (https://ai.nankai.edu.cn/info/1102/3529.htm) and Shan Guo(https://ai.nankai.edu.cn/info/1102/4567.htm ), The main research directions of ROMIOL are introduced as follows.
1.Robotic Patch Clamp System for Brain Science Research
The 21st century is widely regarded as the era of brain science, and patch clamp technology is the key to solving the mysteries of extremely complex brain science problems. For the research on the brain science of awake non-human primates, there are five main shortcomings in current patch clamp technology: blindness, deficiency, clumsiness, difficulty and loss. The patch clamp technology urgently needs to break through the five challenges of clear display of in internal brain environment, precise positioning of neuron cell body and electrode, skillful movement of electrode in vivo environment, accurate measurement of neuron electrophysiological signals and practicable tracing to animal movement. This project will develop a robotic active patch clamp system for brain research in awake non-human primates, which will make breakthrough in five following key technologies, active fixation and tracking of awake animals, dynamic fluorescent imaging based on the flow rate control of fluorescent dye solution in microelectrode, three-dimensional reconstruction and precise positioning based on two-photon microscopic image, motion planning and active obstacle avoidance of robotic patch clamp system, and precise cell sealing and recordings of electrophysiological signals. Integrated with the above key technologies,our system is utilized in researches on electrophysiological properties of the neurons in awake marmosets visual cortex to demonstrate the functional superiority of the robotic patch clamp system. While other researches on electrophysiological properties of the neurons in Alzheimer's disease-model mice cerebral cortex will be performed to verify the wide adaptability of the robotic patch clamp system.

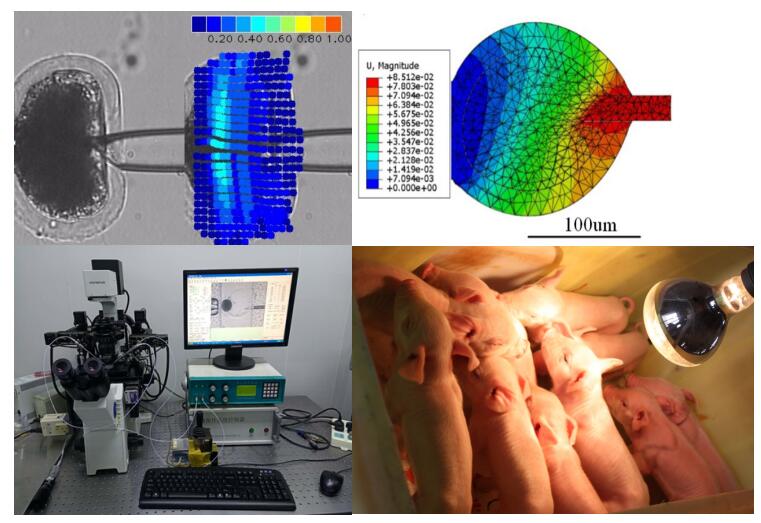
2.Robotic animal clone system
Since the birth of “Dolly”, somatic cell nuclear transfer (SCNT, also called animal cloning) has attracted great attention because of its application value in animal breeding, organ transplantation, gene therapy and endangered species protection. However, cell manipulations in manual operations are harmful to oocytes, which greatly reduces the developmental potential of cloned embryos, resulting in the extremely low success rate of current nuclear transfer operations. Project team designed the robotic oocyte rotation method based on the minimum force, the oocyte orientation selection method based on the intracellular strain, and the robotic label-free precise oocyte enucleation method. The project team established the robotic SCNT operation process, improved the operation efficiency and reduced the operation damage to the oocyte, ultimately significantly increased the cloned embryo viability, got the world's first cloned animals operated by robotic techniques.
3.Robotic in situ Measurement System for Multiple Intracellular Physical Parameters
The intracellular physical parameters, such as cell mass density, cell elasiticity, and cell inner pressure have been proved to be able to regulate biological activities of cells, such as cell division, oocyte maturation and embryo development. As these parameters are usually related with each other, in situ meaurement of them for each cell can decouple their effects on cell activities, and further, reveal the phsical mechanisms behind these cell activities. At present, the measurement of cell mass density, cell elasiticity and cell inner pressure relies on different specific devices due to their different working principles, making the in situ measurement `of the above multiple parameters for each cell unavailable yet. For the first time, this paper reported a robotic system being capable of in situ measurement above three intracellular physical parameters to study their individual and coupled effects on oocyte maturation process. The measurement results of our system for the above three parameters are benchmarked to those measured by the traditional single measured results.

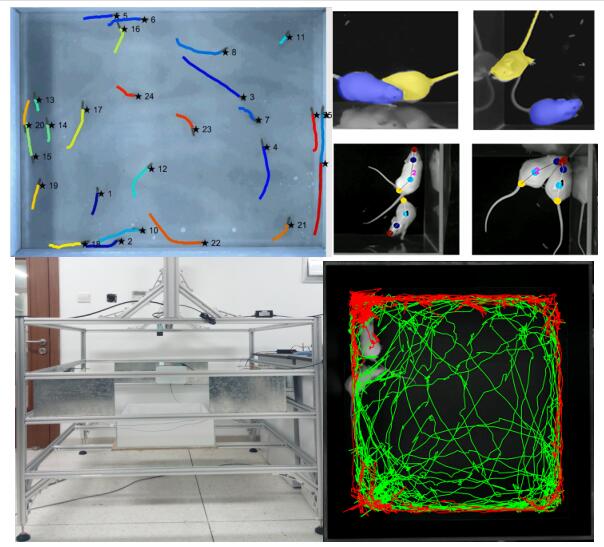
4. Visual tracking of model animals based on individual recognition
It is a great challenge to multi-tracking of model animals, due to the similar appearance, strong mobility and frequent occlusion. Combined with the traditional image analysis methods and deep learning methods, we have broken through the technologies of visual feature extraction, multi-target individual recognition and group tracking of model animals. We also designed and developed several sets of automatic model animal behavior observation systems, realized group tracking and behavior analysis of typical model animals, including adult zebrafish, zebrafish larva and mice.
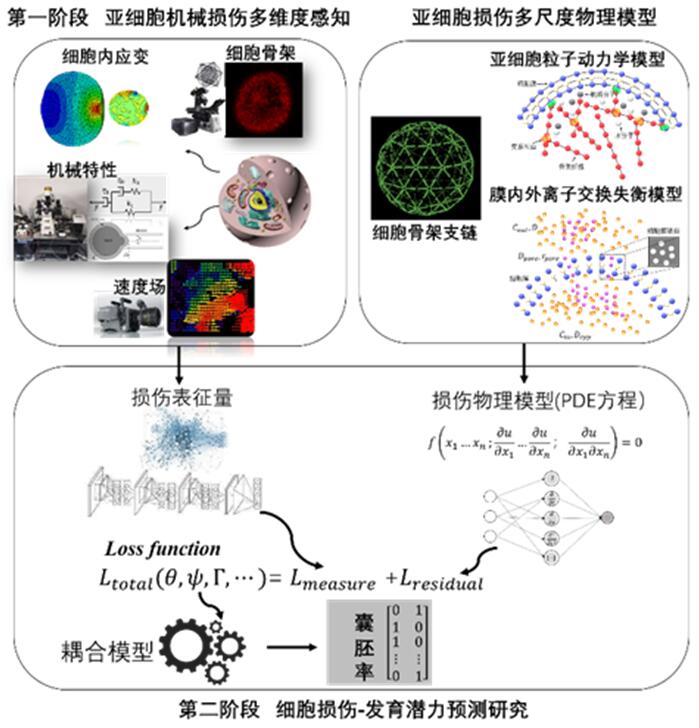
5. The Development of Automated Oocyte Viability Prediction Model
Our work has been focusing on the multi-dimensional and cross-scale perception of damage that is induced by micromanipulation to the subcellular structures, and the development of machine learning-based oocyte viability prediction model. We characterized the damage to oocytes from the mechanical and biological point of view and built physical models to describe the fractured membrane, the fractured bonding of cytoskeleton filaments and the permeability change of membrane. We integrated the machine learning model and the physical models to construct precise oocyte viability model with robustness and interpretability.
6. Modeling and Simulation of Biological Systems
The modeling and simulation of biological systems aim to simulate the formation process of biological pattern in organism tissues and organs by means of computer simulation, so as to reveal the mechanism of pattern formation and tissue development. The research group has made many achievements in the formation of biological patterns and the mechanism of tissue and organ development. For example, the self-organizing behavior of cells was simulated based on reaction-diffusion model; The tissue engineering design was realized based on self-organizing behavior; based on reaction-diffusion model, the spatial structure of pulmonary branching was simulated and the mechanism of pulmonary airway branching was revealed; based on reaction-diffusion model, network pattern morphogenesis was realized and the underlying Turing mechanism was revealed.

Contact US
HR:+86 2285358228 guoyufei@nankai.edu.cn; International Office:+86 2223505863 mengjin@nankai.edu.cn
Location/Campus Map
38 Tongyan Road, Jinnan District, Tianjin, P.R.China 300350



